
概要

軍用の無人車でAIを活用する構想は、自律性だけでなく、応用範囲を広げることも目的としています。どのぐらい範囲を拡張できるのでしょう?可能であれば、戦場で兵士を無人車両で置き換えたいと言っても、支障はないでしょう。無人車を戦場へ配置して負傷した人員を回収できれば、戦場へ配置する医療人員の負傷の可能性をも減らせます。

同じことが小型の目標物捜索にも適用され、車両へ防衛用の小型の武器を取り付けられます。指定された目標を認識して特定する能力を備えます。危険地帯に導入される場合は、攻撃される場合に対応しなければなりません。
別の無人車両の応用例は、ロボットアームの活用です。無人車両はサンプル収集、地雷除去、または一般的な道路清掃作業など、様々な目的へプログラミングできます。各種のアプリケーションは、操作の人員を安全に守ります。
課題
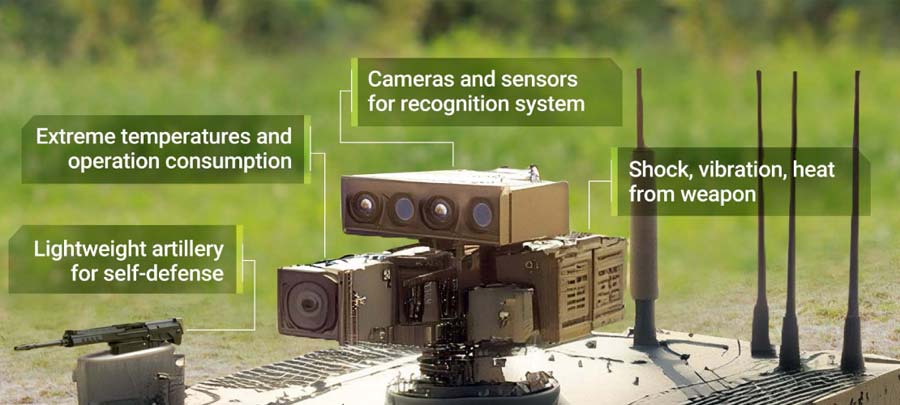
医療の救急車として活動する無人車両へコンピュータシステムを実装する場合、兵士を識別できる認識システム(カメラやセンサー)が必要です。兵士は傷病者の場所へ無人車両を移動させるために、GPSビーコンを携帯する可能性があります。戦場で無人車両へ負傷した兵士を乗せる作業では、ロボットアームを備える別の無人車両や、別の兵士の助けを借りなければならないことがあります。危険地帯へ導入する場合に自己防衛が必要な場合、火器の使用による衝撃や振動(反動やむち打ちなど)、狭い空間への設置、武器が生成する熱など複数の原因で、小火器を搭載するのは課題が生じる可能性があります。コンピュータの実装に影響する他の要素は、屋外の天候条件(零度未満の温度や過酷な熱)、動作時にかかるエネルギー消費などがあります。
センサーが検出を行い、カメラが物体を認識して識別し、アクチュエーターがロボットアームを操作できるようにするため、コンピュータは、AI推論処理能力と接続能力を備える必要もあります。また、ここまでに述べた問題に加え、AIはある程度の決定(認識と識別)を行えますが、監視と確認用にリアルタイムで映像を提供するには、通信機能も必須です。
センサーやカメラを搭載し、無人車両は物体認識またはモーション検出を通じて画像を自動的に取得し、操作人員へリアルタイムにフィードバックして直ちに分析できるようにします。
ソリューション

システムインテグレーターは、車両の環境条件で活躍できるソリューションとし、Neousysの堅牢組込みNVIDIA Jetsonソリューションの実装を選択しました。無人車両はUSB/PoEカメラ、LiDAR、センサーをNeousysのシステムへ接続し、戦場へ配備されます。IP67定格の防水性、高ダイナミックレンジ(120dB HDR以上)、オートホワイトバランス(AWB)、LEDフリッカリング抑制(LFM)を持つカメラを選定して使用することで、システムは明るい晴天から荒い天候、さらには漆黒の闇夜にいたるまで、様々な照明条件で高画質の画像を取得できます。
機械学習/ビジョンアプリケーションを通じて目標を特定でき、必要に応じて対応や行動をとれます。各種の認証(EN 45545/ EN 50155、CE/ FCCなど)が衝撃や振動の多い環境での動作を保証し、システムのNVIDIA Jetson SoM推論コンピューティングはファンレスで最大65°Cの周囲温度、オプションのファンキットを備えれば最大70°Cで動作できます。
また、内部にワイヤレスモジュールの拡張スロットを備えており、リアルタイムに分析データと画像をアップロードし、同時にリモート制御機能を現場から離れた人員へ提供します。