
概述
在AGV自動導引車之前,工廠和倉庫中的絕大多數重物搬運工作都需要依靠人力搬運或人工作業機器來完成。這樣的模式通常需要耗費大量的時間,且由於貨物搬運效率低下,貨物的儲備量和存儲空間往往受到限制。
於是,AGV應運而生。AGV是一台通過電腦控制和車輪驅動的任務型機器人,專為工業應用而設計程式設計,例如用於物品檢查,或在製造工廠和倉庫中進行重物搬運等。預程式設計自動化和重物搬運能力意味著AGV可以有效地分類存儲庫存,從而大大拓展了製造生產的區域,從而提高生產率。
任務專用的輪式移動AGV機器人藉由依靠特定的感測器(例如機器視覺、雷鐳射等)導航在地面上行進,而感測器則是通過標記、電線纜、雷鐳射、磁鐵、物體檢測等進行引導,使得小車AGV不會碰撞障礙物。毫無疑問因此,每一台AGV中都安裝有一台中央控制器,在AGV進行移動搬運和探測識別物體時起到了重要作用。
AGV的不同運作模式

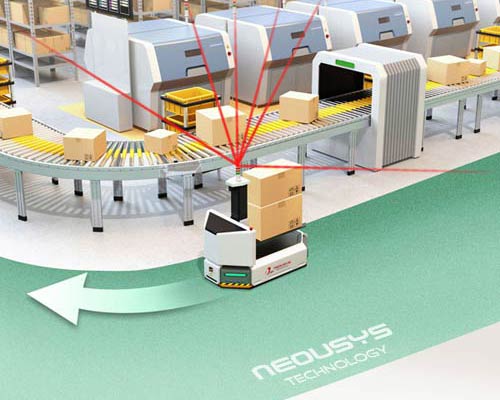
機器視覺,自然地理引制導
這一方案不需要對現有環境做出任何特別的調整。AGV通過機器視覺對環境進行360度的圖像記錄,並通過對環境中固定物體的識別(例如貨架、機架和牆壁)來構建3D地圖。這使得AGV能夠在無需説明的情況下沿著訓練的路線進行作業。

慣性(陀螺)引導
在地面中嵌入應答器,AGV在應答器的幫助和引導下,將遵循電腦給出的指令或任務進行作業。
雷鐳射目標引導
在AGV中內置一個裝有雷鐳射收發器的360度旋回轉台和一張覆蓋了操作區域的地圖。透通過在諸如固定牆面、杆子、機器等物體上放置反射帶,使得機器能夠對其相對位置進行三角測量,從而展開作業。

磁條或色帶引導
沿著地面放置磁條或色帶,AGV將沿著磁條或色帶進行作業。

有線引導
在地面中嵌入電纜,AGV底部附近內置的感測器將根據電纜發出的無線電頻率的引導來進行作業。
AGV的控制系統:Neousys宸曜嵌入式平台
Neousys宸曜的嵌入式平台工控機採用英特爾Intel® Core酷睿™處理器或Atom淩動™處理器,並配有無線WiFi,隔離DIO,COM串口,CAN匯流排等。精密的機構設計使得機器可承受高達50 Grms(運作行狀態)的衝擊和高達5 Grms(運作行狀態)和振動,且真正實現了-40℃~70℃寬溫範圍操作。CAN匯流排模組和隔離DIO分別負責AGV的運動和感測器控制。
宸曜工業電腦的強固DNA
真正實現了工業級寬溫
與其它品牌的工業電腦相比,客戶對我們產品的寬溫性能讚許。我們的系統在嚴苛環境下,尤其是在高溫條件下仍能保持穩定可靠的運作。
抗衝擊和防振動
在運作行狀態下,我們的系統可承受高達50 Grms的衝擊和高達5 Grms的振動,是工廠和倉庫中各種AGV應用的理想選擇。
內置CAN匯流排
作為中央控制器,我們的系統內置了CAN匯流排來控制AGV的移動和方向。
帶隔離的I/O和COM埠
我們的系統配有多個數字I/O和COM埠串口,可自由連接感測器和執行器。
無線通訊模組
我們的系統可選配WiFi,4G模組或兩者兼具。透過這些通訊模組可與附近其它設備,中央電腦或雲系統進行無線通訊。





