
개요
자동 안내 차량(Automated Guided Vehicle; AGV)을 적용하기 이전에는 공장과 창고에서 중량물을 들어올리는 여러 작업은 사람의 노동력 및 작동 기계에 의존했습니다. 이 프로세스는 시간이 많이 걸리고 자재의 용량 및 위치로 인하여 원자재를 이동시키는데 있어 비효율성으로 인해 제한되는 경우가 많았습니다.
이제 컴퓨터 제어 및 휠 기반 로봇인 AGV가 등장했습니다. 이 로봇은 검사 목적과 같은 산업 응용 분야에서 사용하거나 제조 시설 및 창고 안팎에서 무거운 자재를 이동하도록 설계 및 프로그래밍되었습니다. 프로그래밍된 자동화 AGV의 무거운 자재 이동 기능은 자재를 효율적으로 분류하는 동시에 제조 영역을 크게 확장하여 전체 생산성을 크게 높일 수 있음을 의미합니다.
휠 기반의 업무 특정적인 AGV 로봇은 장애물에 충돌하지 않고 마커, 케이블, 레이저, 자석, 물체 감지 등으로 탐색하는 특정 센서(예: 머신 비전, 레이저 등)를 통해 경로를 제어합니다. AGV의 중앙 컨트롤러는 AGV의 움직임과 물체 인식/감지에서 중요한 역할을 합니다.
AGV 설계 유형

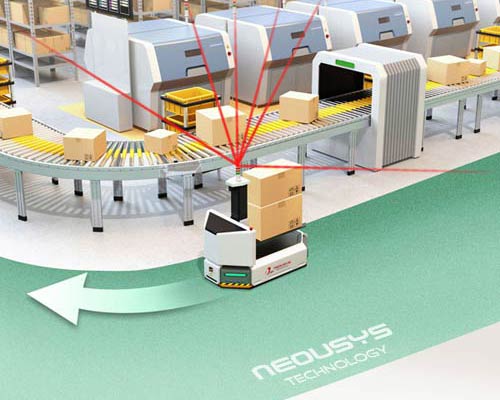
머신 비전, 지형(Natural) 탐색 제어
이 방법은 AGV가 머신 비전을 사용하여 360도 이미지를 기록하고 기둥, 랙 및 벽과 같은 환경의 고정된 개체를 인식하여 3D 지도를 작성하므로 환경에 대한 수정이 필요하지 않습니다. 이를 통해 AGV는 도움 없이 훈련된 경로를 따라 작동할 수 있습니다.

관성(자이로스코프) 유도
바닥에 내장된 트랜스폰더의 도움으로 AGV는 컴퓨터가 제공하는 지시/작업을 따르고 트랜스폰더를 따릅니다.
레이저 표적 유도
물체(벽, 기둥, 기계 등)에 반사 테이프를 배치하고, 360도 회전하는 회전탑에 레이저 송수신기를 장착하며, AGV에서 작동되는 영역의 지형을 측량할 수 있습니다.

자기 테이프 또는 컬러 테이프 유도
AGV는 바닥을 따라 배치된 자기 테이프 또는 컬러 테이프를 사용하여 안내할 수 있습니다.

유선 유도
AGV에는 바닥에 설치된 케이블이 방출하는 무선 주파수를 따라가는 바닥 부근에 설치된 센서가 있습니다.
AGV 제어 시스템인 Neousys 시스템
Neousys 시스템은 Intel Core-i/Atom 프로세서, 무선 WiFi, isolated DIO, 시리얼 포트, CAN 버스 등이 그 특징입니다. 이 시스템은 최대 50 Grms(작동)의 충격과 최대 5 Grms(작동)의 진동을 견딜 수 있도록 설계되었으며 작동 온도 범위는 -40°C ~ 70°C까지 지원합니다. CAN 버스 모듈과 isolated DIO는 각각 AGV의 동작 및 감지 제어를 담당합니다.
Neousys 러기드 DNA
진정한 광범위한 온도 작동 가능
다른 제조사 시스템과 비교해, 우리의 시스템이 극심한 조건 하에서, 특히 고온 작동 하에서도 지나치게 잘 유지된다는 고객들의 말을 종종 전해 듣습니다.
충격 및 진동 방지 인증
작동 시에, 이 시스템은 공장 및 창고에서 다양한 AGV를 사용하기에 이상적인 것으로 최대 50Grms의 충격과 최대 5Grms의 진동을 견디도록 설계되었습니다.
내장 CAN 버스
중앙 컨트롤러로서, Neousys 시스템에는 AGV의 이동 및 방향을 제어하는 내장된 CAN 버스가 있습니다.
Isolated 디지털 IO 및 시리얼 포트
Neousys 시스템에는 센서 및 액츄에이터와 연결하는 다중 디지털 I/O 및 시리얼 포트가 있습니다.
무선 통신 모듈
Neousys 시스템에는 WiFi, 4G 무선 전화 모듈의 옵션 또는 시스템 내에 두 가지 옵션 모두 딸려 있습니다. 모두 부근의 다른 장치, 중앙 컴퓨터 또는 클라우드 시스템과 무선으로 통신합니다.





