
概述
 根據聯合國和國際禁止地雷運動(ICBL),全球60多個國家埋有5000多萬枚地雷,造成每年1萬人死亡和2萬人受傷 (lan, 2017)。這些地雷通常被埋在農村地區、山坡等地形複雜的環境中。掃雷的費用雖然非常昂貴,但在無價的生命和每年都會造成的可怕傷害面前,這是必須要做的。
根據聯合國和國際禁止地雷運動(ICBL),全球60多個國家埋有5000多萬枚地雷,造成每年1萬人死亡和2萬人受傷 (lan, 2017)。這些地雷通常被埋在農村地區、山坡等地形複雜的環境中。掃雷的費用雖然非常昂貴,但在無價的生命和每年都會造成的可怕傷害面前,這是必須要做的。
掃雷的進程包括標記已探測到地雷的區域並清除地雷,進而將其劃為安全區域。通過人力探測並掃雷的傳統做法是十分危險且耗時的,因此,部署自主機器人來取代人力是毋庸置疑的選擇。根據聯合國公約,已經進行過掃雷的區域需要有直觀的視覺標識——沒有什麼比採用一台自主機器人更為合適了,它們能夠對雷區進行探測並用紅、白漆線標記掃描的區域。
解決問題
自主性
採用的車輛必須具備自動駕駛能力,同時還能夠探測和標記地雷。所做的標記應符合聯合國傳統的白(安全)紅(危險)漆線標記。
全天候線型檢測
根據預先確定的衛星圖像將掃雷車探測車部署到一個待排查的涉雷區域,同時車身左右兩側裝有相機和噴漆裝置。掃雷車能夠嚴格按照其車輪的移動對平坦地形進行探測。掃雷車在涉雷區域移動,裝在車輛前方的磁性探測器對隱藏在地下的地雷進行掃描。
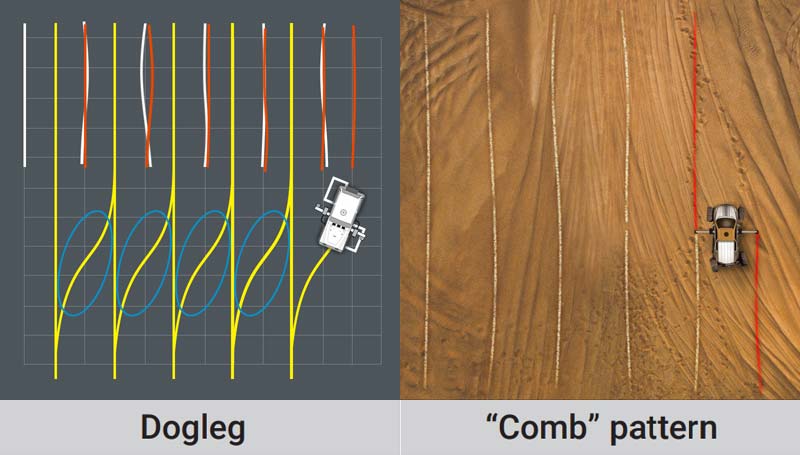
更易操作的梳齒狀(comb)區域掃描
車輛掉頭時有一個最小轉彎半徑圓周,這會導致掃雷作業中出現距離或間隙(該區域的掃描密度較小)。然而,掃雷區域是不允許出現這樣的間隙的。
解決方案

自動駕駛掃雷車
宸曜科技的嵌入式計算平臺運算平台提供各種連接埠,可安裝雷射雷達感測器和相機,實現自動駕駛。將這種自動駕駛掃雷車部署在現場,對目的地區域進行掃描,並用紅、白漆線進行標記,以示該區域是安全的還是需要進行排雷的。
線型檢測,正向/反向追蹤
掃雷車擁有豐富的USB和PoE埠,能夠與各類相機相連,為進行反向追蹤掃描的俯視相機提供了多種選擇。專為探測特定已知顏色線條(紅或白)的脊線而設計,這裡所遇到的挑戰與大多數戶外影像處理應用一樣——不斷變化的光照條件(陰影,光線不足,陰天或陽光過曝等),因此選擇合適的相機尤為重要。
梳齒狀掃描區域,獲得更好的掃描密度
車輛行駛至掃描區域的遠端,在行駛至下一個通道之前反向沿原路返回,我們將稱之為“折返灣”(dogleg)移動(藍色圈出部分)。這麼做的原因是為了避免車輛在掉頭時產生的掃描間隙。這種形式的移動在掃描每個通道的時候都會重複,如圖中所示。
宸曜嵌入式運算平台的優勢
宸曜強固型嵌入運算平台擁有如下優勢:
環境
- IP67/IP69K等級防水防塵GPU嵌入式運算平台
- 強固的運算平台,適用於極嚴苛的環境
- 抗振動和衝擊能力,可用於車載應用
- 真正的-25℃至70℃寬溫運行
- 專利的擴充卡槽設計,有效引導並分散熱/電干擾
- 三軸驗證的專用減振支架,有效抵禦衝擊和振動
- 小尺寸緊湊的宸曜VTC系列,適用於狹小的環境部署
連線性/可擴展性
- 支援PoE+功能,可連接千兆乙太網相機
- 支援USB 3.1 Gen1/ Gen 2,可連接USB相機
- 連接埠帶螺絲鎖固,確保連接強固性
- 支持 WiFi 6/ WiFi 5/ 5G/ 4G無線通訊,可通過mini-PCIe模組進行擴充
強大的推理能力
- 支援兩片 NVIDIA® RTX 30/ 20系列圖形卡
- 支援 NVIDIA® RTX 30/ 20系列圖形卡
- 支援 NVIDIA® Tesla/ Quadro推理加速器
電力
- 專利的基於超級電容的工業級備用電源模組,在意外斷電時保障系統的正常運行和關機
- 寬廣範圍直流輸入
- 可配置的智慧點火信號電源控制